|
平成23年度共同利用研究会
|
|
「サルが二足で歩くとき」
|
|
|
|
発表要旨
|
|
3月17日(土)13:10〜13:40
|
|
体幹運動の捕捉方法とその機能的意義
|
|
熊倉 博雄(大阪大学 人間科学研究科)
|
|
3月17日(土)13:40〜14:20
|
|
サルからヒトの二足歩行を考える
|
|
木村 賛(東京大学 名誉教授)
|
|
3月17日(土)14:20〜15:00
|
|
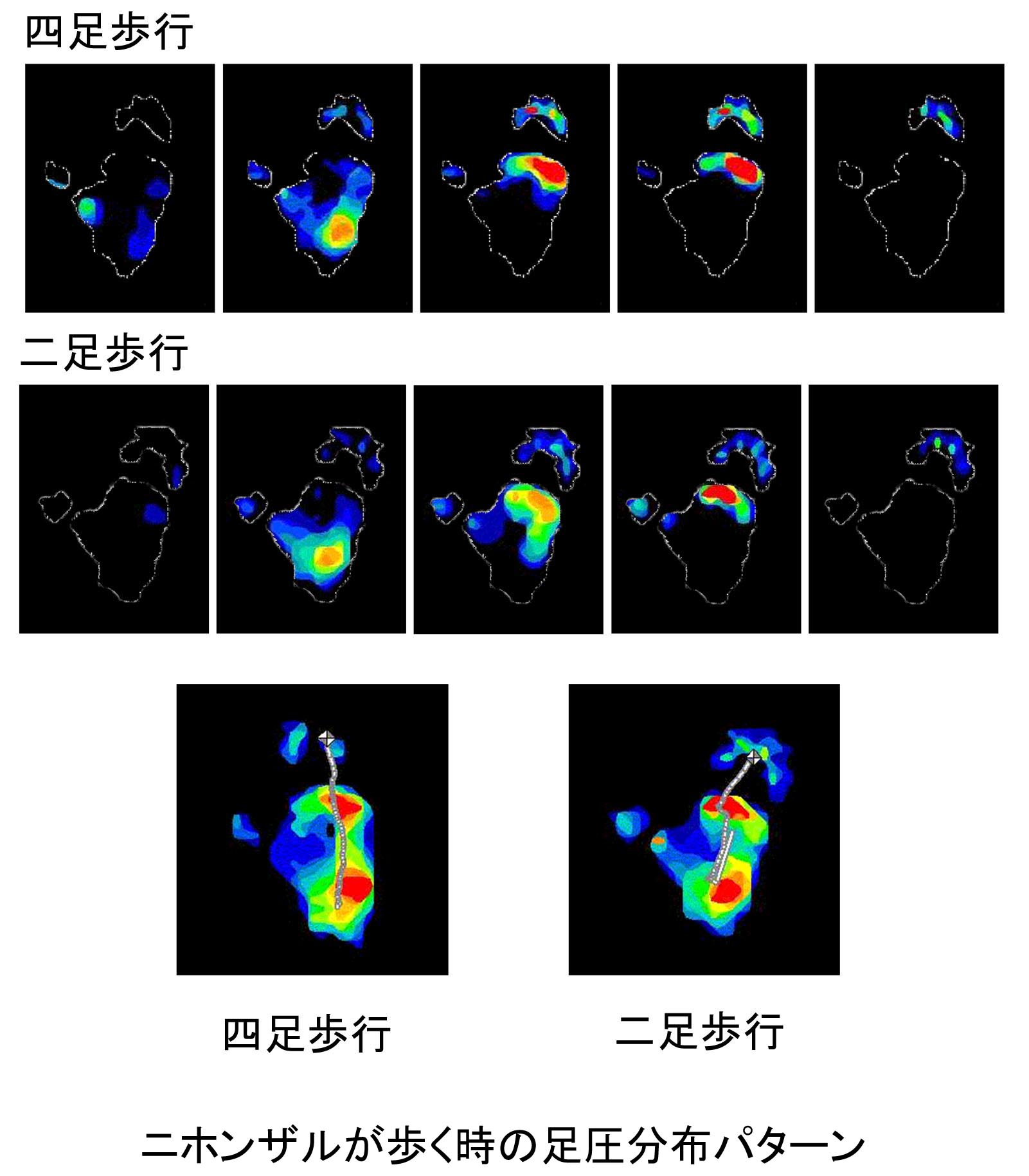
足圧と足形態からみたサルの二足歩行
|
|
平崎 鋭矢(京都大学 霊長類研究所)
|
|
3月17日(土)15:10〜15:50
|
|
歩行の神経生理学
|
|
高草木 薫(旭川医科大学 脳機能医工学研究センター)
|
|
3月17日(土)15:50〜16:30
|
|
トレッドミル歩行に関連したサル一次運動野の神経細胞活動
|
|
中陦 克己(近畿大学 医学部)
|
|
3月17日(土)16:30〜17:10
|
|
ニホンザルの二足歩行学習
|
|
森 大志(山口大学 農学部)
|
|
3月18日(日)9:00〜9:40
|
|
チンパンジーとボノボのロコモーション:樹上移動と地上移動の種間比較
|
|
古市 剛史(京都大学 霊長類研究所)
|

|
under construction
|
|
3月18(日)9:40〜10:20
|
|
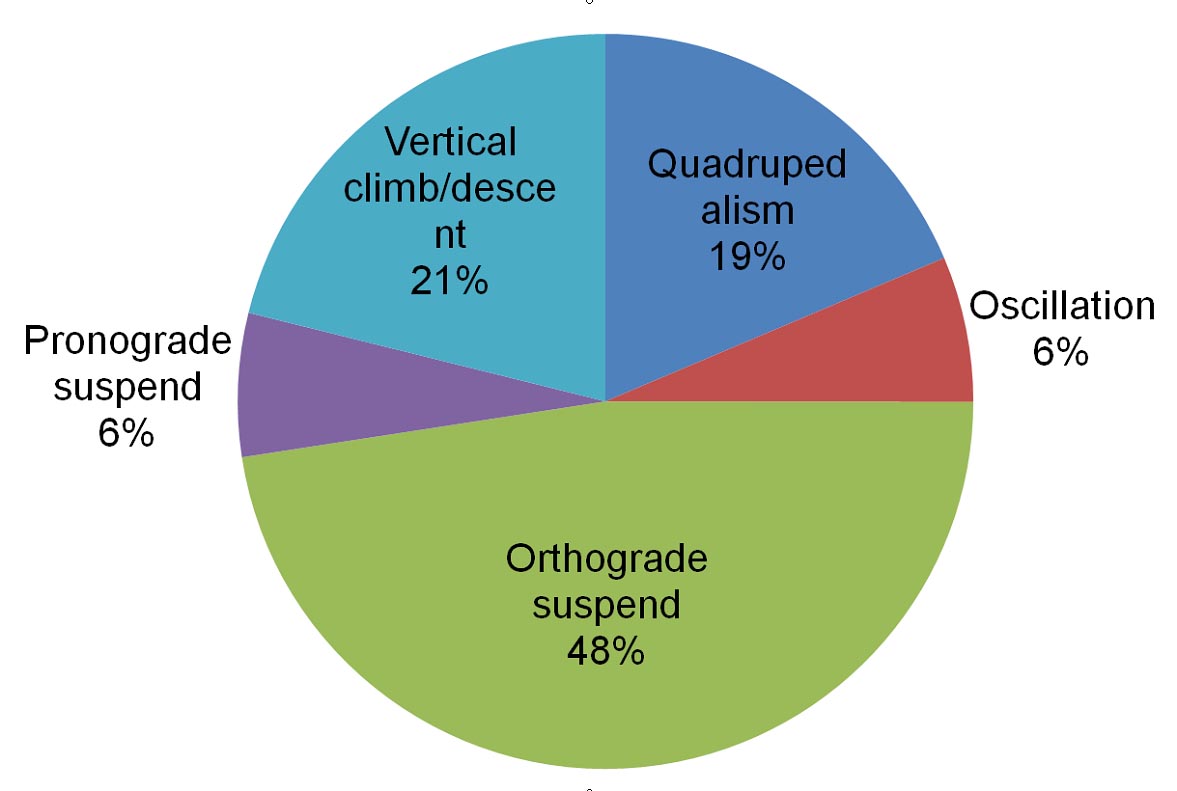
オランウータンのロコモーションの多様性と、多様性を生み出す要因
|
|
久世濃子(京都大学 野生動物研究センター)
|
|
3月18日(日)10:30〜11:00
|
|
柔軟かつロバストな直立姿勢の神経制御戦略
|
|
野村 泰伸(大阪大学 基礎工学研究科)
|
|
under construction
|
|
3月18日(日)11:00〜11:40
|
|
ニホンザル二足歩行運動の順動力学・逆動力学シミュレーション
|
|
荻原 直道(慶応義塾大学 理工学研究科)
|
|
under construction
|
|
3月18日(日)11:40〜12:20
|
|
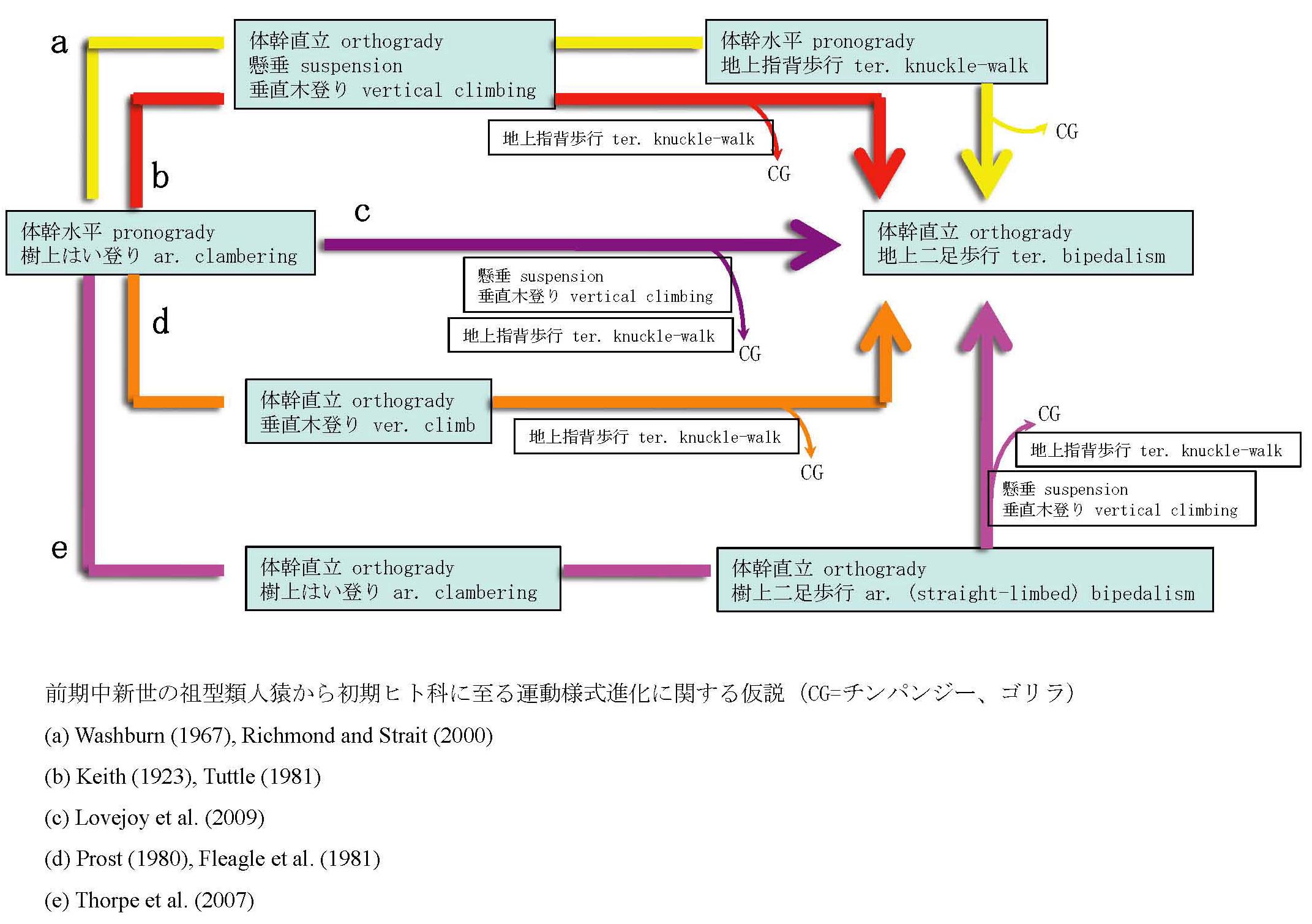
初期人類の二足歩行
|
|
中務 真人(京都大学 理学研究科)
|
人類の系統において、直立二足歩行がどのように獲得されてきたかを直接示す証拠は未だない。しかし、近年、アルディピテクス・ラミダスの研究により大きな進展が二つあった。第一は、直立二足歩行にいたる運動進化モデルとして、体幹水平型樹上はい登り(pronograde arboreal clambering)が新たに提唱されたことである。第二は、「アウストラロピテクス段階」よりも、より原始的な二足歩行の様式が明らかにされたことである。これまで、数種の直立二足歩行前の運動進化モデルが提唱されているが、それらも含め、こうした研究の現状についてレビューする。
|
|
|